.:: Motion Sensing Robot ::.
Robot that detects motion and runs away
LAST MODIFIED: 06-22-2022 | PAGE HITS: 2,353
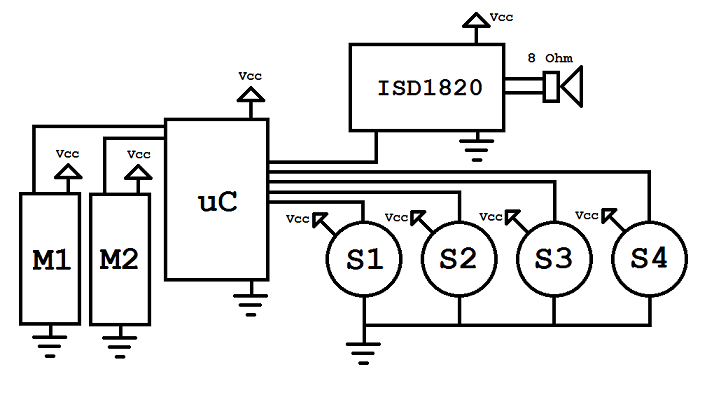
This project is a robot that runs away from people while playing music. As of now I did not yet make the robot run away. For now it runs a demo program to demonstrate mobility. I am currently in the process of 3D printing blinders for the motion sensors. I am also waiting for the sound boards to arrive.
DOWNLOAD VIDEO
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 | #include <servo-01.h> // SENSORS int front_sensor() { int ret = 0; if(input(pin_A0) == 1) {ret = 1;} else {ret = 0;} return ret; } int right_sensor() { int ret = 0; if(input(pin_A1) == 1) {ret = 1;} else {ret = 0;} return ret; } int rear_sensor() { int ret = 0; if(input(pin_A2) == 1) {ret = 1;} else {ret = 0;} return ret; } int left_sensor() { int ret = 0; if(input(pin_A3) == 1) {ret = 1;} else {ret = 0;} return ret; } // MOTOR CONTROL void left_servo_backward() { for (int i=0;i<3;i++) { output_high(PIN_B7); delay_us(500); output_low(PIN_B7); delay_us(19500); } } void left_servo_forward() { for (int j=0;j<3;j++) { output_high(PIN_B7); delay_us(2500); output_low(PIN_B7); delay_us(17500); } } void right_servo_backward() { for (int j=0;j<3;j++) { output_high(PIN_B6); delay_us(2500); output_low(PIN_B6); delay_us(17500); } } void right_servo_forward() { for (int i=0;i<3;i++) { output_high(PIN_B6); delay_us(500); output_low(PIN_B6); delay_us(19500); } } // MOTION CONTROL void go_forward(int amount) { for(int i=0;i<amount;i++) { left_servo_forward(); right_servo_forward(); } } void go_backward(int amount) { for(int i=0;i<amount;i++) { left_servo_backward(); right_servo_backward(); } } void turn_left(int amount) { for(int i=0;i<amount;i++) { left_servo_backward(); right_servo_forward(); } } void turn_right(int amount) { for(int i=0;i<amount;i++) { left_servo_forward(); right_servo_backward(); } } // AUDIO void play_music() { output_high(PIN_B0); delay_ms(100); output_low(PIN_B0); } // MAIN LOOP void main() { setup_lcd(LCD_DISABLED); set_tris_a(0b11111111); // PORTA input set_tris_b(0b00000000); // PORTB output delay_ms(5000); // WAIT FOR SENSORS TO CLEAR while(TRUE) { /* if(front_sensor() == 1) { play_music(); go_backward(50); delay_ms(5000); } if(rear_sensor() == 1) { play_music(); go_forward(50); delay_ms(5000); } if(left_sensor() == 1) { play_music(); turn_right(8); go_forward(50); delay_ms(5000); } if(right_sensor() == 1) { play_music(); turn_left(8); go_forward(50); delay_ms(5000); } */ // DEMO 01 turn_left(32); turn_right(32); delay_ms(1000); // DEMO 02 go_forward(20); go_backward(20); turn_right(8); turn_left(8); turn_left(8); turn_right(8); delay_ms(1000); // DEMO 03 go_forward(20); turn_left(8); go_forward(20); turn_left(8); go_forward(20); turn_left(8); go_forward(20); turn_left(8); delay_ms(1000); } } |